


产品展示 /
PRODUCT DISPLAY
产品展示 /
PRODUCT DISPLAY








| ABOUT USPBT是一家充滿活力,積極進取的公司。一群熱愛工業自動化,行業經驗超過10年的同仁創建了這家公司。 |
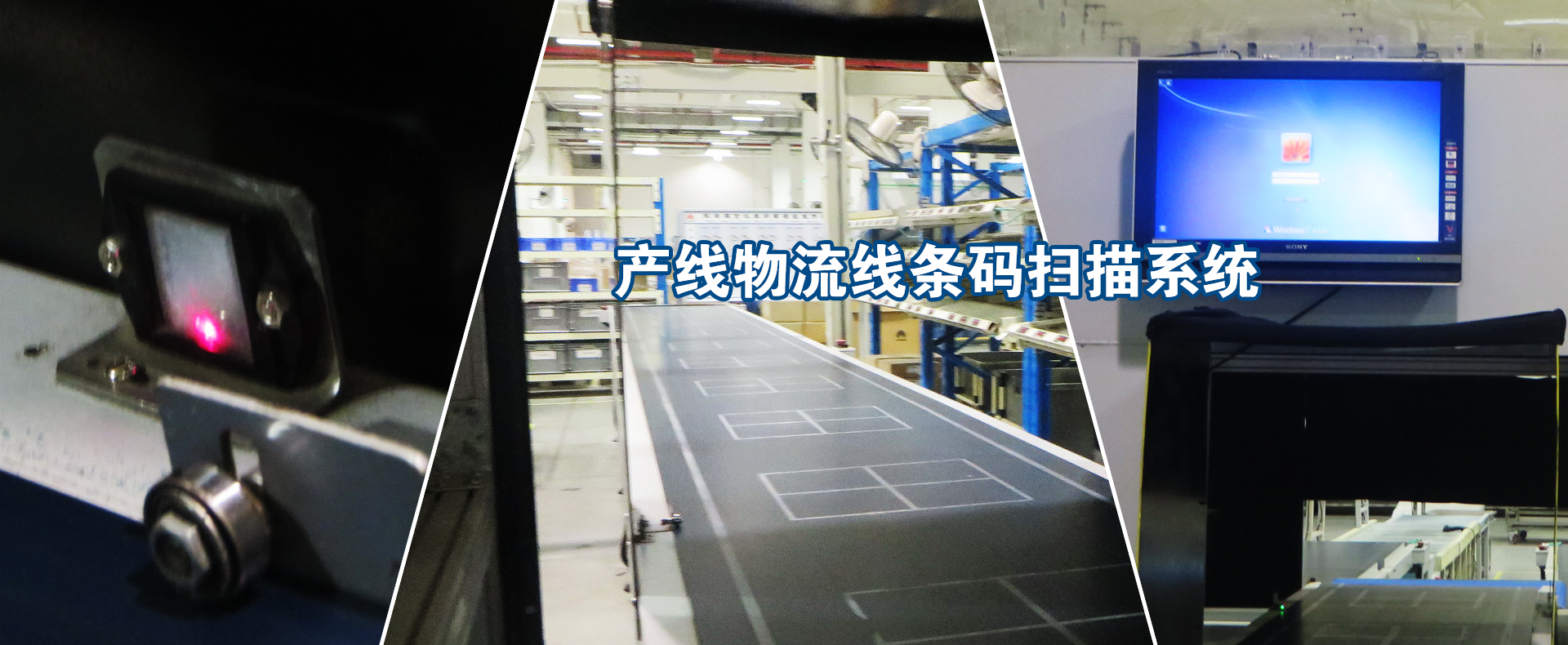
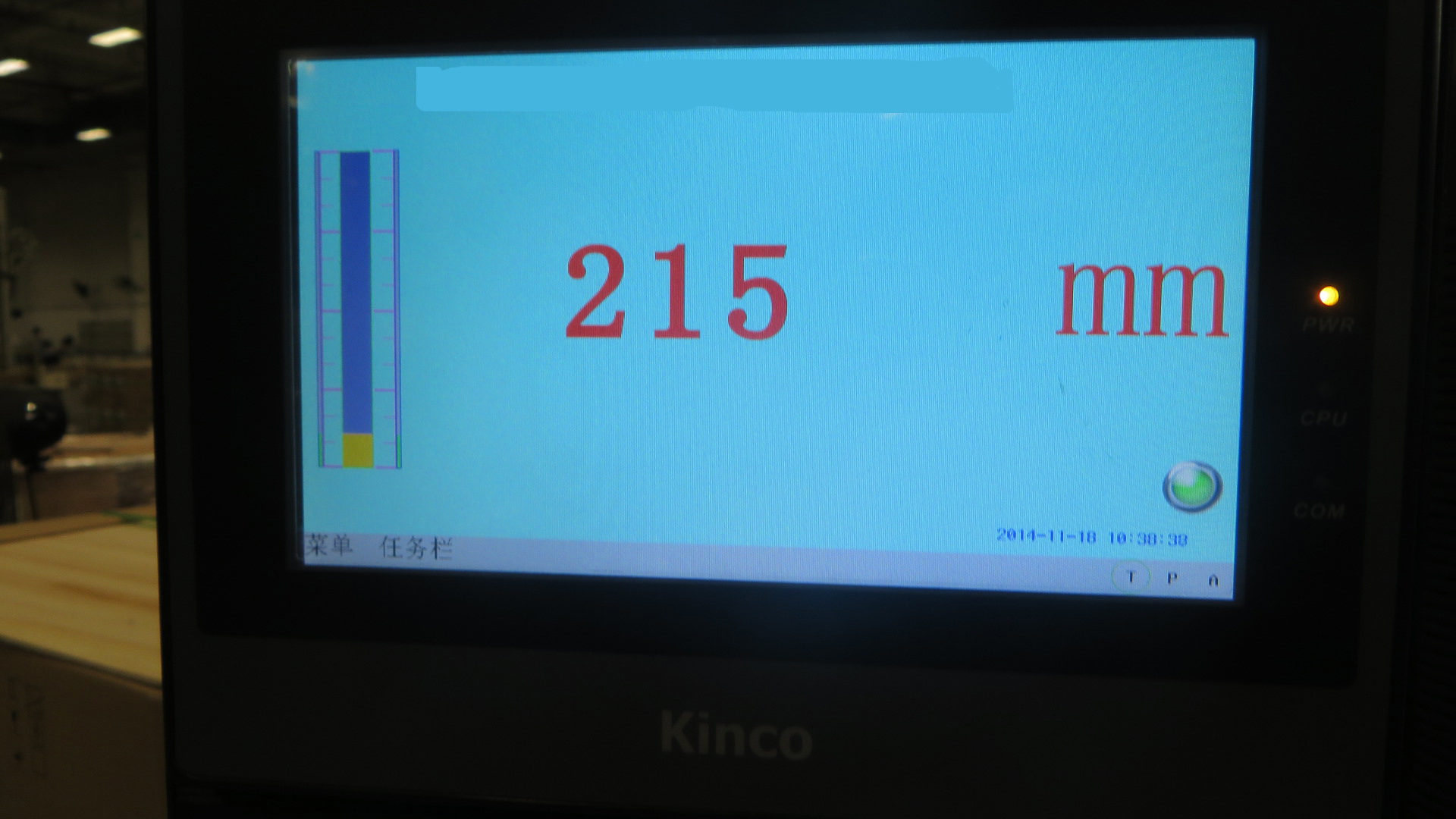
项目方案
ITEMS
项目方案
ITEMS


公司地址地址:深圳市龙华区观盛二路5号捷顺科技中心A座506 | 
联系方式13316539139 | 
电子邮箱PBT@PBTGROUP.COM.CN |